개요
공압 로봇 디버링 — 자체 에어 모터와 측방향 스프링 추종
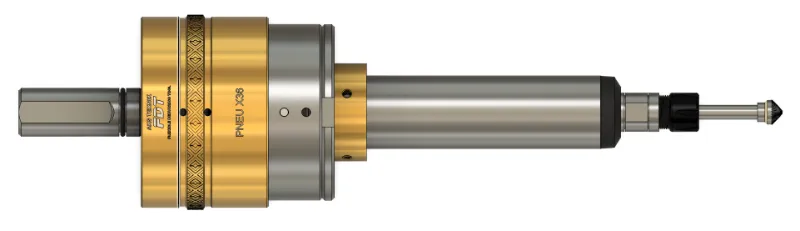
FDT PNEUMATIC X36은 자체 공압 모터와 내장 측방향 스프링 추종 기능을 갖춘 에어 구동 로봇용 디버링 툴입니다. CNC 스핀들에서 회전력을 받는 스핀들 장착형과 달리 자체 내장 에어 모터를 보유하고 있습니다. 20 mm 웰던 플랫 샹크로 로봇 암이나 벤치에 장착하며, 커터 회전은 후면 에어 포트에 연결된 압축 에어에 의해 구동됩니다.
30,000 rpm / 350W 윤활 에어 스핀들이 ER-11 콜렛을 통해 커터를 구동합니다. 샹크 직경 ⌀0.5~⌀7 mm의 표준 산업용 초경 버와 프로파일을 사용할 수 있습니다. 고속 스핀들은 특히 알루미늄에서 깨끗한 결과를 제공하며, 빠른 커터 회전과 측방향 스프링 추종의 조합으로 2차 수작업 없이 일관된 에지 품질을 실현합니다.
내장 스프링이 12 mm의 측방향 추종을 제공합니다. 커터 어셈블리가 최대 12 mm까지 측방향으로 변위되어, 로봇 프로그램이 모든 위치 편차를 보정하지 않아도 작업물 에지의 변동을 자동 추종합니다. 측방향 접촉 압력은 내장 메커니즘으로 조정 가능하여 소재와 에지 상태에 맞게 챔퍼 폭과 절삭력을 튜닝할 수 있습니다.
핵심 설계 특징은 측방향 가압력이 에어 압력이 아닌 기계식 스프링에 의해 발생한다는 점입니다. 공급 에어 압력이 변동해도 챔퍼 일관성이 유지됩니다. 에어 압력을 직접 측방향 추종에 사용하는 공구에서 흔히 발생하는 한계를 해결한 구조입니다. 윤활 압축 에어(8.3 l/sec, 1/8" Gas 연결, 호스 내경 6 mm)를 사용합니다.
장점
주요 장점
- CNC 스핀들 불필요 — 자체 에어 모터가 20 mm 웰던 플랫 샹크로 로봇 암이나 벤치에 장착; 장비 개조 불필요
- 12 mm 측방향 스프링 추종 — 에지 편차마다 로봇 경로를 재프로그래밍하지 않아도 불규칙한 작업물 에지를 자동 추종
- 스프링 기반 측방향 가압력 — 양산 중 에어 공급 압력이 변동해도 챔퍼 폭과 접촉력 일정 유지
- 무단 조정식 접촉 압력 — 외부 금색 링 회전으로 챔퍼 강도를 연속 설정; 별도 공구나 분해 불필요
- ER-11 콜렛 시스템 — ⌀0.5~⌀7 mm 표준 산업용 초경 버 사용 가능; 모든 표준 버 형상과 프로파일 호환
- 30,000 rpm / 350W 스핀들 — 고속으로 깨끗한 챔퍼링, 특히 알루미늄 작업물에 효과적
- 자동화 설계 — 페이로드 3 kg 이상의 모든 로봇과 호환; 자동 디버링 라인과 벤치 장착형 스테이션에도 적합
사양
기술 사양
| 항목 | 값 |
|---|---|
| 주문 코드 | 30.420.00 |
| 구동 방식 | 공압 — 자체 에어 모터(CNC 스핀들 불필요) |
| 변위 유형 | 측방향(XY 평면) — 스프링 추종 |
| 최대 측방향 변위 | 12 mm |
| 측방향 압력 조정 | 내장 메커니즘 — 챔퍼 폭과 접촉력 조정 가능 |
| 스핀들 회전수 | 30,000 rpm |
| 출력 | 350 W |
| 회전 방향 | 시계 방향 |
| 콜렛 | ER-11 — 초경 버 ⌀0.5~⌀7 mm 사용 가능 |
| 장착 샹크 | 20 mm 웰던 플랫 |
| 에어 공급 | 필요 — 윤활 에어(오일 미스트 윤활) |
| 에어 소비량 | 8.3 l/sec |
| 에어 연결 | 1/8" Gas — 후면 |
| 에어 호스(내경) | 6 mm |
| 소음 수준 | 78 dB |
| 공구 중량 | 약 2.5 kg |
| 특수 구성 | 특수 버전(예: 측면 에어 인렛) 요청 시 제공 — AKS Teknik에 문의. |
사용 방법
작동 지침
- 01
로봇 암 또는 벤치에 장착
20 mm 웰던 플랫 샹크를 로봇 툴 플랜지 또는 벤치 홀더에 삽입하고 고정합니다. 측방향 디버링 힘이 샹크를 통해 전달되므로 견고한 클램핑이 필수입니다. 공구 후면의 에어 연결 포트가 호스 연결 가능한 위치에 있는지 확인합니다.
12 mm 측방향 스프링 추종 - 02
윤활 압축 에어 연결
에어 공급 호스(내경 6 mm)를 공구 후면의 1/8" Gas 포트에 연결합니다. 반드시 윤활 에어(오일 미스트 윤활)를 사용하십시오 — 내장 에어 모터의 안정 작동과 수명 유지에 필수적입니다.
- 03
측방향 접촉 압력 설정
공구 본체의 외부 금색 링을 돌려 접촉 압력을 설정합니다 — 시계 방향 증가, 반시계 방향 감소이며 무단 조정으로 별도 공구가 필요하지 않습니다. 경질 소재(스틸, 주철)나 큰 에지 버는 압력을 높이고, 알루미늄, 황동, 박판 형상의 미세 에지는 낮춥니다. 양산 전 테스트 패스를 실시하고 챔퍼 폭을 검사합니다.
- 04
초경 버 장착
작업물 에지 프로파일에 적합한 초경 버 형상을 선택합니다. 샹크를 ER-11 콜렛에 삽입하고 콜렛 너트를 조입니다. 작업물 접촉 전 런아웃을 확인합니다 — 런아웃이 크면 챔퍼 불균일과 커터 마모가 가속됩니다.
- 05
로봇 경로 프로그래밍 및 실행
로봇이 일정한 이송 속도로 에지를 추종하도록 프로그래밍합니다. 12 mm 측방향 스프링 추종이 위치 편차를 자동 흡수하므로 경로를 각 에지에 정밀 보정할 필요가 없습니다. 일정한 이송 속도가 일정한 챔퍼 폭의 핵심 요소입니다. 샘플 부품으로 테스트 사이클을 실행하고 챔퍼 품질과 균일성을 검사한 후, 필요 시 압력이나 이송을 조정하여 양산에 적용합니다.
커터 선택
호환 초경 버
ER-11 콜렛을 사용하며, 샹크 직경 ⌀0.5~⌀7 mm의 표준 산업용 초경 버와 프로파일 공구를 사용할 수 있습니다. 커터 형상 선택은 작업물 에지 프로파일, 컨투어 형상, 필요한 챔퍼 폭에 따라 달라집니다.
| 커터 유형 | 특성 | 적용 |
|---|---|---|
| 볼(구형) 초경 버 샹크 ⌀6 mm | 구형 절삭 헤드 — 어느 측방향 접근 각도에서든 에지에 자동 정렬; 전방향 효과적 | 범용 로봇 디버링; 프로파일이나 곡면 에지; 부품 주위로 접근 각도가 변하는 컨투어 |
| 원통형 초경 버 샹크 ⌀6 mm | 원통형 절삭 헤드 — 직선 구간의 평면 에지 디버링에 효과적 | 평면 직선 에지 디버링; 에지 높이가 일정한 경우; 에지 프로파일이 균일한 곳에 사용 |
| 90° 원추형 초경 버 샹크 ⌀6 mm | 에지 모서리에 정의된 챔퍼 생성 | 정의된 챔퍼 각도가 필요한 밀링 또는 선삭 에지 챔퍼링 |
| 특수 프로파일 커터 표준 산업용 프로파일 | 특정 에지 프로파일, 반경, 성형 형상을 위한 특수 형상 | 표준 형상으로 대응 불가한 작업물 에지의 적용별 디버링 — AKS Teknik에 문의 |
적용 조건, 소재, 로봇 시스템에 맞는 커터 권장 사항은 AKS Teknik에 문의하십시오.
FAQ
자주 묻는 질문
-
FDT PNEUMATIC X36이란 무엇이며, 스핀들 장착형 디버링 툴과 어떻게 다릅니까?
FDT PNEUMATIC X36은 자체 에어 모터를 탑재한 공압 로봇용 디버링 툴입니다. CNC 스핀들이 필요하지 않습니다. 20 mm 웰던 플랫 샹크로 로봇 암이나 벤치에 장착하며, 커터 회전은 압축 에어에 의해 구동됩니다. 내장 스프링이 12 mm 측방향 추종을 제공하여 불규칙한 작업물 에지를 자동 추종합니다. FDT SX0 같은 스핀들 장착형 공구가 머신 스핀들에서 회전력을 받는 반면, FDT PNEUMATIC X36은 자체 구동 장치를 갖추고 있어 CNC 스핀들 없는 로봇 장착 및 벤치 장착 디버링에 적합합니다.
-
FDT PNEUMATIC X36에 CNC 스핀들이 필요합니까?
아니요. 자체 공압 모터를 탑재하고 있습니다. 20 mm 웰던 플랫 샹크로 로봇 암이나 벤치에 장착하며, 샹크는 기계적 장착만 제공합니다. 커터 회전은 후면 1/8" Gas 포트에 연결된 압축 에어에 의해 구동됩니다. 윤활 압축 에어를 공급할 수 있는 모든 로봇 암, 자동 디버링 지그, 벤치 스테이션에 적합합니다.
-
FDT PNEUMATIC X36의 측방향 압력 조정은 어떻게 작동합니까?
공구 본체의 외부 금색 링을 돌려 접촉 압력을 설정합니다 — 시계 방향 증가, 반시계 방향 감소이며 별도 공구나 분해 없이 무단 조정 가능합니다. 압력을 높이면 더 넓고 강한 챔퍼, 낮추면 더 좁고 가벼운 챔퍼가 생성됩니다. 스프링 기반 추종이 에지 간 높이 차이, 표면 불규칙성, 로봇 경로 편차 등 형상 변동을 흡수하므로 부품마다 로봇 프로그램을 수정할 필요가 없습니다. 측방향 가압력은 에어 압력이 아닌 스프링에 의해 발생하여, 에어 공급 압력 변동에도 챔퍼 일관성이 유지됩니다.
-
스프링 기반 측방향 가압력이 에어 압력 직접 변위보다 나은 이유는 무엇입니까?
스프링에 의한 측방향 가압력은 에어 공급 압력 변동과 무관하게 일정합니다. 산업용 압축 에어 시스템은 다른 공구의 동시 사용, 배관 길이, 컴프레서 출력 변화 등으로 압력 변동이 불가피합니다. 가압력이 에어 압력에 직접 의존하면 모든 변동이 챔퍼 폭과 디버링 강도를 변화시킵니다. FDT PNEUMATIC X36의 스프링 기반 메커니즘은 접촉력을 스프링 예압으로 설정하므로, 공급 압력이 변동해도 양산 전체에 걸쳐 챔퍼 품질이 일정합니다.
-
FDT PNEUMATIC X36을 장착하려면 로봇 페이로드 용량이 얼마나 필요합니까?
공구 중량이 약 2.5 kg이므로 페이로드 3 kg의 로봇이면 충분합니다. 대형 로봇 암은 필요하지 않습니다. 20 mm 웰던 플랫 샹크로 장착하고 후면에서 에어 공급에 연결합니다. 로봇 장착 디버링 셀, 자동 디버링 라인, 벤치 장착형 스테이션과 호환됩니다. 웰던 플랫 샹크는 범용 산업 인터페이스로 로봇 전용이 아니며, 20 mm 샹크를 수용하는 모든 지그나 홀더에 사용 가능합니다.
-
FDT PNEUMATIC X36에 호환되는 초경 버는 무엇입니까?
FDT PNEUMATIC X36은 ER-11 콜렛을 사용하며 샹크 직경 ⌀0.5~⌀7 mm의 표준 산업용 초경 버와 프로파일 공구를 사용할 수 있습니다. ER-11 호환 샹크의 모든 표준 초경 버나 프로파일 커터를 바로 장착 가능합니다. 커터 형상(구형, 원통형, 원추형, 특수 프로파일)은 작업물 에지 유형, 컨투어 형상, 필요 챔퍼 폭에 따라 선택합니다. 적용 조건에 맞는 커터 권장 사항은 AKS Teknik에 문의하십시오.
적용 분야
대표 산업 및 적용
로봇 장착 디버링 셀
FDT PNEUMATIC X36을 로봇 암에 장착하여 디버링을 자동화합니다. 로봇이 프로그래밍된 경로를 추종하는 동안 12 mm 측방향 스프링 추종이 에지와 위치 편차를 자동 보정하므로 부품마다 재프로그래밍이 필요 없습니다. 주조, 단조, 기계 가공 부품의 양산 디버링에 적합합니다.
자동 디버링 라인
부품이 고정 디버링 스테이션에 제시되는 자동 제조 라인에 통합합니다. 스프링 기반 추종이 12 mm 범위 내에서 부품 간 형상 변동을 사이클 간 기계적 조정 없이 처리합니다. 에지 프로파일이 일관되지만 동일하지 않은 주조, 단조, 프레스 성형 부품의 대량 생산에 특히 효과적입니다.
벤치 장착형 디버링 스테이션
작업자가 작업물을 장착된 공구에 접촉시키는 반자동 벤치 디버링입니다. 웰던 플랫 샹크로 벤치 지그에 견고하게 장착하며, 공압 모터가 작업 지점에서 전기 연결 없이 고속 절삭을 제공합니다. 완전한 로봇 통합이 불필요한 소량 생산과 재작업 디버링에 효과적입니다.
동영상
FDT PNEUMATIC X36 작동 영상
다운로드
기술 문서
관련 제품